Mars Keşif Orbiti'ndeki yüksek çözünürlüklü HiRISE görüntülerine baktıysanız veya yeni Google Mars'ı keşfetme şansınız varsa, Mars'ın kraterler, dağlar, yutucular ve her türlü ilginç ve tehlikeli arazi ile dolu olduğunu biliyorsunuz. . Katmanlı birikintiler, çökeltiler, kırılma ve faylanma gibi alanlar Mars'ta üretilen metan kaynaklarını aramak için kullanılan yerlerdir. Ancak 2011 Mars Bilim Laboratuarı (MSL) dahil olmak üzere şu anki gezici tarzımızı hain araziye göndermek çok riskli. Ancak JPL'den mühendisler, California Teknoloji Enstitüsü'ndeki öğrencilerle birlikte, uçurumlardan uzaklaşabilen, dik ve kayalık arazide çevik olarak seyahat edebilen ve keşfedebilen MSL gibi daha büyük gezginlere eklenebilen çok yönlü, düşük kütleli bir robot tasarladı ve test etti. derin kraterler.
Axel adı verilen bu prototip gezici, gelecekteki robot uzay aracının Mars gibi yabancı dünyaları daha iyi keşfetmesine ve araştırmasına yardımcı olabilir. Yeryüzünde Axel arama ve kurtarma operasyonlarında yardımcı olabilir.
JPL'nin robotik ve hareketlilik bölümünden Axel’ın baş araştırmacısı Issa A.D. Nesnas, “Axel geçmişte keşfedemediğimiz arazileri, dikey eğimli burunlu derin kraterler gibi keşfetme yeteneğimizi artırıyor” dedi. “Ayrıca, Axel nispeten düşük kütleli olduğu için, bir görev birkaç Axel gezgini taşıyabilir. Bu bize, genel riski yönetilebilir tutarken keşfedeceğimiz arazi konusunda daha agresif olma fırsatı verecektir. ”
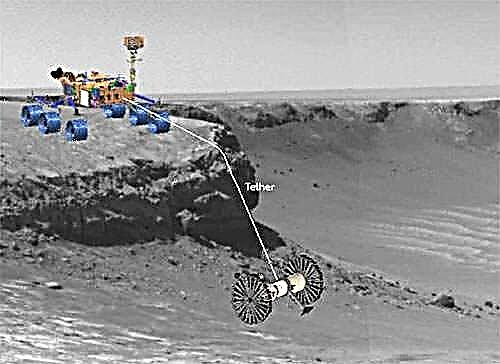
Nesnas, Axel'nin bir yo-yo gibi olduğunu söyledi - daha büyük bir gezgiye bağlı bir ip üzerinde ve kraterlerin, kanyonların ve olukların kenarlarında yukarı ve aşağı gidebilir, diğer gezginler için güvenli olmayan bölgeleri keşfedebilir.

Hem baş aşağı hem de sağ tarafı yukarı doğru çalışabilen Axel'ın sade ve zarif tasarımı sadece üç motor kullanır: biri iki tekerleğini kontrol etmek için bir tane ve bir kolu kontrol etmek için üçüncüsü. Kol, bilim adamlarının çalışması için ay veya gezegen materyali toplamak için bir kepçe içerir ve ayrıca robotun 360 derece eğilebilen iki stereo kamerasını ayarlar.

Axel’ın silindirik gövdesi bilgi işlem ve kablosuz iletişim yeteneklerine ve otonom olarak çalışacak eylemsiz bir sensöre sahiptir. Ayrıca Axel'ın daha büyük bir iniş, gezici veya bağlantı noktasından inmek için çözemeyeceği bir ipi de spor. Rover, büyük katlanabilir tekerleklerden şişirilebilir tekerleklere kadar farklı tekerlek tiplerini kullanabilir, bu da roverın sert bir inişi tolere etmesine ve kayalık araziyi idare etmesine yardımcı olur.
Axel 1999'dan beri geliştirilmektedir ve Caltech, Purdue Üniversitesi ve Arkansas Teknik Üniversitesi öğrencileri bu çok yönlü gezgini geliştirmek için yıllar boyunca JPL ile işbirliği yapmıştır.
Axel hakkında daha fazla bilgi için JPL’nin Axel sayfasına ve Caltech’in Axel web sitesine bakın.